
AIエンジニアやプログラマーに転職して、次世代ロボット開発に貢献しましょう。
最近の研究によると、培養した骨格筋組織を使った二足歩行ロボットが開発されました。
この技術に使用される可能性が高いIT技術や具体的なPythonコードも解説しますので、AIエンジニアやプログラマーに転職したい方には必読の内容です。
また、この二足歩行ロボットを応用したビジネスや医療分野での新しいアイデアも紹介しますので、新しい視点や発想を得られます。
培養した筋組織で二足歩行のロボット開発

東京大学と早稲田大学の研究チームは、骨格筋組織を動力源とした二足歩行ロボットを開発しました。このロボットは、培養液の中で電気を流すことで筋組織が収縮し、歩行動作をします。
将来的には、バイオハイブリッドソフトロボットとして自己修復や柔軟な動きが可能になることが期待されています。
この技術は、環境に適応しやすい新しいタイプのロボット開発につながる可能性があるということです。
二足歩行ロボット開発に使用されるIT技術
「培養した筋組織で二足歩行のロボット開発」には、どのようなIT技術が使われているでしょうか。
使用されている可能性が高いプログラム言語、AI技術、クラウド技術、セキュリティ対策などについて推測してみましょう。
- プログラム言語:
- Python: データ分析や機械学習モデルの開発に広く使用されています。
- MATLAB: 科学計算やシミュレーションに利用されることがあります。
- C++: ロボットの制御システムやリアルタイム処理に適しています。
- AI技術:
- 機械学習: ロボットの動作を最適化するために使用される可能性があります。
- ニューラルネットワーク: 筋組織の収縮パターンを学習し、制御するために活用されるかもしれません。
- コンピュータビジョン: ロボットが環境を認識し、障害物を避けるために利用される可能性があります。
- クラウド技術:
- AWSやAzureなどのクラウドプラットフォーム: データの保存、処理、分析のために使用される可能性があります。
- IoTプラットフォーム: ロボットとクラウド間のデータ通信に利用されるかもしれません。
- セキュリティ対策:
- データ暗号化: 機密情報や研究データを保護するために使用される可能性があります。
- ネットワークセキュリティ: ロボットとクラウド間の通信を保護するために活用されるかもしれません。
- アクセス制御: 研究データへの不正アクセスを防ぐために利用される可能性があります。
各IT技術は、ロボットの開発と運用に重要な役割を果たすと推測されます。
筋組織で二足歩行のロボット開発のためのPythonコード例
筋組織の収縮パターンをシミュレートするPythonコードを書いてみましょう。
以下のPythonコードは、機械学習を使用して、電気信号に応じた筋組織の収縮を予測します。
import numpy as np
import matplotlib.pyplot as plt
from sklearn.linear_model import LinearRegression
# Sample data: electrical signal (input) and muscle contraction (output)
electrical_signal = np.array([0, 1, 2, 3, 4, 5]).reshape(-1, 1)
muscle_contraction = np.array([0, 0.2, 0.4, 0.6, 0.8, 1])
# Linear regression model to predict muscle contraction based on electrical signal
model = LinearRegression()
model.fit(electrical_signal, muscle_contraction)
# Predict muscle contraction for new electrical signals
new_electrical_signal = np.array([6, 7, 8, 9, 10]).reshape(-1, 1)
predicted_contraction = model.predict(new_electrical_signal)
# Plotting the results
plt.scatter(electrical_signal, muscle_contraction, color='blue', label='Actual Data')
plt.plot(new_electrical_signal, predicted_contraction, color='red', label='Predicted Contraction')
plt.xlabel('Electrical Signal')
plt.ylabel('Muscle Contraction')
plt.legend()
plt.show()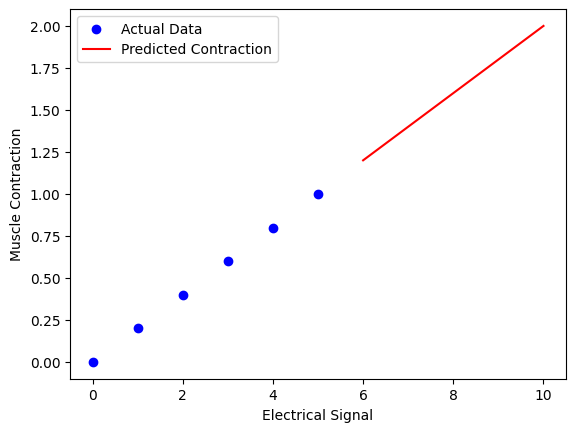
numpyを使用して、電気信号と筋組織の収縮のサンプルデータを作成します。sklearn.linear_modelのLinearRegressionを使用して、電気信号と筋組織の収縮の関係を学習する線形回帰モデルを作成します。- モデルを使用して、新しい電気信号に対する筋組織の収縮を予測します。
matplotlib.pyplotを使用して、実際のデータと予測された収縮をプロットし、結果を視覚化します。
このPythonコードは、AIや機械学習を使用して、ロボットの筋組織の動作をシミュレートする基本的な手順を示しています。
二足歩行ロボット技術のビジネスアイデア
「培養した筋組織で二足歩行のロボット開発」について、応用アイデアを考えてみましょう。
同業種(ロボティクス、AI、バイオテクノロジー)への応用アイデア:
- 医療用ロボット: 手術やリハビリテーションに使用されるロボットに、バイオハイブリッド技術を応用して、より自然な動きや自己修復能力を持たせる。
- 探査ロボット: 柔軟で自己修復可能なバイオハイブリッドロボットを開発し、災害現場や未知の環境での探査に使用する。
- 人工筋肉の開発: バイオハイブリッド技術を使用して、人工筋肉を開発し、義肢やウェアラブルデバイスに応用する。
他業種への応用アイデア:
- 農業: バイオハイブリッドロボットを農業分野に応用し、作物の収穫や管理を効率化する。
- 環境保護: 自己修復能力を持つバイオハイブリッドロボットを使用して、環境モニタリングや汚染除去作業を行う。
- エンターテイメント: バイオハイブリッド技術を利用した動きの自然なアニマトロニクスを開発し、映画やテーマパークでのアトラクションに使用する。
「培養した筋組織で二足歩行のロボット」は、さまざまな分野に応用できそうですね。
まとめ
培養した筋組織を動力源とした二足歩行ロボットの開発について紹介しました。
この技術に使用されるプログラム言語やAI技術、クラウド技術、セキュリティ対策についても紹介したので、AIエンジニアやプログラマーに転職を考えている人の参考になったと思います。
医療用ロボットや探査ロボット、農業や環境保護など、さまざまな分野への応用アイデアも解説しました。
あなたもAIエンジニアやプログラマーに転職して、先進的なロボット開発に貢献しましょう。

▼AIを使った副業・起業アイデアを紹介♪

