AIエンジニアやプログラマーに転職して、家庭用ロボットを開発しましょう。最近のニュースによると、人間のような動きができる二足歩行ロボットが実用化段階に入ったそうです。
家庭用ロボットの開発に必要なIT技術や具体的なPythonコードも解説するので、AIエンジニアやプログラマーに転職したい人は必読です。
また、この技術を応用したさまざまな業界でのビジネスアイデアも紹介するので、新しい視点や発想を得られますよ。
AI時代の労働力革命の最前線、家庭用ロボット開発の世界をのぞいてみましょう。
家庭用ロボット「NEO Beta」AI時代の労働力革命

カリフォルニアとノルウェーの企業1Xが、家庭用人型ロボット「NEO Beta」を発表しました。このロボットは二足歩行で、人間のような動きができます。家事や倉庫、製造業、サービス業での活用が期待されています。
CEOのBernt Børnichは、このロボットが手頃な価格の車程度の費用で製造可能だと述べています。また、安全性を最優先事項とし、実際の家庭で使用してフィードバックを集める予定です。
NEO Betaは、従来の硬い動きのロボットとは異なり、生物学的にインスピレーションを受けたデザインで、人々の中で安全に働くことができます。1Xは、安全で知的な人型ロボットによって、豊富な労働力を提供することをめざしています。
家庭用ロボットの開発:利用されるIT技術
家庭用ロボットは、AIを搭載することで、2029年までには家庭教師、医者、弁護士、公認会計士などの役割も担うようになるでしょうね。
家庭用ロボットの開発に利用される主なIT技術を挙げてみましょう。
- プログラミング言語
Python: AIや機械学習に広く使われる言語
C++: ロボットの制御システムによく使用される高速な言語 - AI技術
機械学習: ロボットが経験から学習する能力を与える
深層学習: 複雑なパターンを認識するのに役立つ
自然言語処理: ロボットが人間の言葉を理解し、対話するために使用 - データベース技術
SQLデータベース: 構造化データの保存と管理に使用
NoSQLデータベース: 大量の非構造化データを扱うのに適している - クラウド技術
クラウドストレージ: データをオンラインで保存し、アクセスする
クラウドコンピューティング: 複雑な計算を遠隔で処理する - セキュリティ対策
暗号化: データを保護し、プライバシーを守る
ファイアウォール: 不正アクセスからシステムを守る - センサー技術
カメラ: 視覚情報を取得する
マイク: 音声を認識する
触覚センサー: 物体との接触を感知する - ロボット工学
モーター制御: ロボットの動きを制御する
バランス制御: ロボットの安定性を保つ
各技術を組み合わせることで、環境を認識し、人間と対話し、さまざまなタスクを実行できる家庭用ロボットが開発されます。
PythonとAIで家庭用ロボットの開発
PythonとAIで、家庭用ロボットを開発するコードを書いてみましょう。
以下のPythonコードは、音声認識と自然言語処理を使用してユーザーの命令を理解し、適切なタスクを実行する簡単なAIアシスタントを模倣しています。
import random
import numpy as np
import matplotlib.pyplot as plt
from sklearn.feature_extraction.text import CountVectorizer
from sklearn.naive_bayes import MultinomialNB
# Sample data for training
commands = [
"Turn on the lights",
"Turn off the lights",
"Set temperature to 22 degrees",
"Play some music",
"Stop playing music",
"What's the weather like today?",
"Set an alarm for 7 AM",
"Remind me to buy groceries",
"Clean the living room",
"Water the plants"
]
tasks = [
"lighting",
"lighting",
"temperature",
"entertainment",
"entertainment",
"information",
"scheduling",
"reminder",
"cleaning",
"maintenance"
]
# Create a vectorizer and fit it to the commands
vectorizer = CountVectorizer()
X = vectorizer.fit_transform(commands)
# Train a Naive Bayes classifier
clf = MultinomialNB()
clf.fit(X, tasks)
# Function to process user input and predict task
def process_command(command):
X_test = vectorizer.transform([command])
prediction = clf.predict(X_test)
return prediction[0]
# Simulate robot's actions
def execute_task(task):
actions = {
"lighting": "Adjusting home lighting...",
"temperature": "Changing room temperature...",
"entertainment": "Managing entertainment system...",
"information": "Retrieving information...",
"scheduling": "Setting up schedule...",
"reminder": "Creating a reminder...",
"cleaning": "Initiating cleaning sequence...",
"maintenance": "Performing maintenance task..."
}
return actions.get(task, "I'm not sure how to handle that task.")
# Simulate user interaction
print("NEO Beta: Hello! How can I assist you today?")
# Track task frequency for visualization
task_frequency = {task: 0 for task in set(tasks)}
for _ in range(10): # Simulate 10 interactions
user_input = random.choice(commands) # Randomly select a command for simulation
print(f"User: {user_input}")
predicted_task = process_command(user_input)
task_frequency[predicted_task] += 1
response = execute_task(predicted_task)
print(f"NEO Beta: {response}\n")
# Visualize task frequency
plt.figure(figsize=(10, 6))
plt.bar(task_frequency.keys(), task_frequency.values())
plt.title("Frequency of Tasks Performed by NEO Beta")
plt.xlabel("Tasks")
plt.ylabel("Frequency")
plt.xticks(rotation=45, ha='right')
plt.tight_layout()
plt.show()EO Beta: Adjusting home lighting...
User: Water the plants
NEO Beta: Performing maintenance task...
User: Turn on the lights
NEO Beta: Adjusting home lighting...
User: Stop playing music
NEO Beta: Managing entertainment system...
User: Water the plants
NEO Beta: Performing maintenance task...
User: Turn on the lights
NEO Beta: Adjusting home lighting...
User: Stop playing music
NEO Beta: Managing entertainment system...
User: What's the weather like today?
NEO Beta: Retrieving information...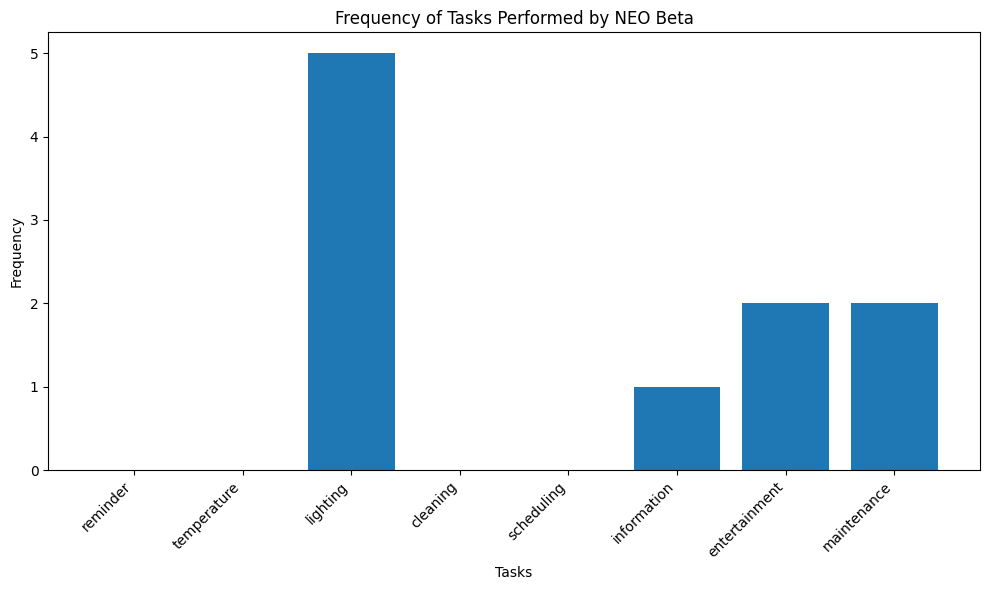
このコードの主な特徴と機能を箇条書きで解説します。
- サンプルデータの作成:
コマンドとそれに対応するタスクのリストを作成しています。
実際のユーザーの発言と、ロボットが実行すべきタスクを模倣しています。 - 自然言語処理:
scikit-learnのCountVectorizerを使用して、テキストデータを数値ベクトルに変換しています。
機械学習モデルがテキストを理解できるようになります。 - 機械学習モデル:
MultinomialNBクラスを使用して、ナイーブベイズ分類器を訓練しています。
モデルは、入力されたコマンドに基づいて適切なタスクを予測します。 - コマンド処理:
process_command関数は、ユーザーの入力を受け取り、適切なタスクを予測します。 - タスク実行:
execute_task関数は、予測されたタスクに基づいて適切な行動を選択します。 - ユーザーインタラクションのシミュレーション:
ランダムに選ばれたコマンドを使用して、10回のユーザーとの対話をシミュレートしています。 - タスク頻度の可視化:
matplotlib.pyplotを使用して、実行されたタスクの頻度を棒グラフで表示しています。
上記のPythonコードは、家庭用ロボットが自然言語を理解し、適切なタスクを実行する基本的な仕組みを示しています。実際の開発では、より複雑なモデルや大規模なデータセット、高度な自然言語処理技術が使用されます。
家庭用ロボットの開発:応用アイデア
家庭用ロボットを開発する技術の、応用アイデアを考えてみましょう。
同業種(家電・ロボット産業)への応用アイデア
- スマート家電の連携システム
家庭用ロボットが中心となり、冷蔵庫や洗濯機などの家電を一括制御 - 介護支援ロボット
高齢者の日常生活をサポートし、健康状態を監視する専用ロボット - ペットケアロボット
留守中にペットの世話をしたり、遊び相手になるロボット - 教育支援ロボット
子どもの学習をサポートし、個別指導を行うAI搭載ロボット - セキュリティロボット
家の警備を行い、不審者を検知して通報するロボット
他業種への応用アイデア
- 医療分野
診察補助ロボット:医師の診察をサポートし、患者データを分析 - 農業分野
自動栽培ロボット:作物の状態を監視し、最適な環境を維持 - 小売業
接客支援ロボット:商品案内や在庫確認を行い、人間スタッフをサポート - 教育分野
個別指導AIシステム:生徒の学習進度に合わせて最適な教材を提供 - 交通・運輸業
自動運転配送ロボット:商品の配達や荷物の運搬を自動で行う - ホテル・旅館業
コンシェルジュロボット:チェックインや観光案内などを多言語で対応 - オフィス業務
業務効率化AI:定型業務を自動化し、会議の議事録作成なども行う - 飲食業
調理補助ロボット:簡単な調理や盛り付けを自動で行う - 建設業
現場監督AIシステム:工事の進捗管理や安全確認を自動で行う - エンターテインメント業
パーソナライズドAIキャラクター:ユーザーの好みに合わせて対話や演出を行う
家庭用ロボットを開発する技術は、さまざまな分野に応用できそうですね。まさに、早い者勝ちのビジネスチャンスです。
ひとりカラオケで相手をしてくれるロボットや、ひとり居酒屋で会話して入れるロボットも登場するでしょう。
家庭用ロボットの開発:まとめ
家庭用ロボットの開発について解説しました。人工知能と機械学習を活用した最先端の家庭用ロボットの研究で使われるIT技術や、Pythonでの具体的なコーディング方法を解説したので、AIエンジニアやプログラマーへの転職を考えている人の参考になったと思います。
また、この技術を応用したさまざまな業界でのビジネスや新しいアイデアについても紹介しました。
あなたもAIエンジニアやプログラマーに転職して、次世代の家庭用ロボットを開発しましょう。これからの時代、私たちの日常生活を革新的に変えるのは、AIエンジニアが開発する家庭用ロボットです。AIと共に進化する未来社会の扉を、あなたの手で開いてみませんか。

▼AIを使った副業・起業アイデアを紹介♪

