IBMが最近、マイクロ粒子を輸送するスマート素材を使った4Dプリント技術の特許を取得しました。この革新的な技術は、医療から製造業までさまざまな分野に大きな変革をもたらす可能性があります。
今回は、この技術の詳細とそれを活用したAI起業のアイデアを紹介します。
ニュース記事の要約
テクノロジー大手のIBMが、米国特許商標庁から4Dプリントによるスマート素材を使ったマイクロ粒子輸送技術の特許を取得しました。この特許によると、各スマート素材は形状記憶合金やポリマーを使用しており、温度・光・磁気・電流などの外部刺激に反応する特性を持っています。
変形した後に元の形状に戻る性質を利用して、研究者たちは素材に動きを誘発し、従来の方法では輸送が困難または不可能な微小粒子の運搬に活用できるのです。利用者は最初に配送経路と環境条件を設定し、配送する品目のサイズ・形状・重量・組成を記録します。その後、機械学習アルゴリズムが適切な刺激を適用して素材を動かします。

ニュース記事に使用されているIT技術
まずは、ニュース記事で使用されているIT技術を解説します。
- 4Dプリンティング技術: 3Dプリンティングの発展形で、印刷に使用される素材が外部刺激に反応して形状を変化させる技術です。時間経過による変化という「第4の次元」が加わることから4Dと呼ばれています。
- 機械学習(ML)アルゴリズム: スマート素材の動きを制御するために使用されています。このアルゴリズムは素材の動きを監視し、経路からの逸脱や障害物を検出した場合に自動的に対応策を講じることができます。
- スマートマテリアル技術: 温度・光・磁気・電流などの外部刺激に反応して性質や形状が変化する材料工学の分野です。この技術では形状記憶合金やポリマーが使用されています。
- マイクロ粒子操作技術: 直径1〜100ミクロンの微小粒子を正確に輸送・操作する技術です。この技術は、血液や消化管などのさまざまな媒体によって移動できる特性を持っています。
AI起業アイデア3選
では、ニュース記事を元にしたAI起業のアイデアを紹介します。
1. MicroMed Delivery Systems
医療分野での薬物送達に特化した4Dプリント技術を活用したスタートアップです。AIを使って患者の体内の特定の細胞や組織に薬剤を正確に届けるシステムを開発します。がん治療などで使用される強力な薬剤を、健康な細胞に影響を与えることなく腫瘍細胞だけに届けることができれば、副作用を大幅に減らすことが可能になるでしょう。AIは患者の生体データをリアルタイムで分析し、薬物の配送経路を最適化できます。
2. NanoFab Solutions
半導体製造業向けの微小電子部品を4Dプリント技術で作成・配送するビジネスです。AIを活用して超小型の電子部品を設計し、ナノレベルで正確に配置することで、より小型で高性能な電子機器の製造を可能にします。このアプローチは従来の半導体製造方法よりも効率的で、エネルギー消費も少なく済む可能性があります。特に、量子コンピューティングや先端的な医療機器などの分野で需要が見込まれます。
3. EnviroClean Micro-Agents
環境浄化に特化した4Dプリントマイクロ粒子を開発するスタートアップです。AIに制御されたマイクロ粒子が水中や土壌中の汚染物質を特定し、吸着または分解します。特に、マイクロプラスチックや重金属などの検出が難しい汚染物質の除去に効果を発揮します。AIは汚染の種類と濃度を分析し、最も効果的な浄化戦略を決定できるのです。また、浄化活動のリアルタイムモニタリングと報告システムも提供することで、環境規制への準備にも役立ちます。
アイデアを実現するPythonコード
では、アイデアを実現するPythonコードを書いてみましょう。「EnviroClean Micro-Agents」のマイクロプラスチック検出と浄化効率のシミュレーションを作成します。
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
import random
# 環境シミュレーションの設定
class EnvironmentSimulation:
def __init__(self, width=100, height=100, pollution_count=50):
self.width = width
self.height = height
self.environment = np.zeros((height, width))
# 汚染物質(マイクロプラスチック)をランダムに配置
for _ in range(pollution_count):
x, y = random.randint(0, width-1), random.randint(0, height-1)
pollution_level = random.uniform(0.5, 1.0)
self.environment[y, x] = pollution_level
# 環境の拡散をシミュレート(汚染物質が少し広がる)
self.environment = self._diffuse(self.environment, 3)
# クリーニングエージェントの初期位置
self.agents = []
for _ in range(10):
self.agents.append({
'x': random.randint(0, width-1),
'y': random.randint(0, height-1),
'collected': 0
})
def _diffuse(self, data, iterations):
# 簡単な拡散シミュレーション
result = data.copy()
for _ in range(iterations):
temp = result.copy()
for i in range(1, self.height-1):
for j in range(1, self.width-1):
result[i, j] = 0.7 * temp[i, j] + 0.075 * (
temp[i+1, j] + temp[i-1, j] + temp[i, j+1] + temp[i, j-1]
)
return result
def update_agents(self):
# AIエージェントの動きをシミュレート
for agent in self.agents:
# 現在位置の周辺8マスの汚染レベルを確認
best_direction = {'x': 0, 'y': 0, 'value': -1}
for dx in [-1, 0, 1]:
for dy in [-1, 0, 1]:
nx, ny = agent['x'] + dx, agent['y'] + dy
if nx < 0 or nx >= self.width or ny < 0 or ny >= self.height:
continue
if self.environment[ny, nx] > best_direction['value']:
best_direction = {'x': dx, 'y': dy, 'value': self.environment[ny, nx]}
# 汚染レベルが高い方向に移動
if best_direction['value'] > 0:
agent['x'] += best_direction['x']
agent['y'] += best_direction['y']
# 汚染物質を回収
collected = min(0.1, self.environment[agent['y'], agent['x']])
self.environment[agent['y'], agent['x']] -= collected
agent['collected'] += collected
def get_pollution_level(self):
return np.sum(self.environment)
def get_collection_efficiency(self):
total_collected = sum(agent['collected'] for agent in self.agents)
initial_pollution = 50 * 0.75 # 初期汚染物質の平均量
return total_collected / initial_pollution * 100 if initial_pollution > 0 else 0
# シミュレーション実行
sim = EnvironmentSimulation()
pollution_history = []
efficiency_history = []
# グラフィカル表示の設定
fig, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(15, 5))
# ヒートマップの初期表示
heatmap = ax1.imshow(sim.environment, cmap='YlOrRd')
ax1.set_title('Pollution Distribution')
plt.colorbar(heatmap, ax=ax1, label='Pollution Level')
# エージェント位置の初期表示
agent_scatter = ax1.scatter(
[agent['x'] for agent in sim.agents],
[agent['y'] for agent in sim.agents],
color='blue', marker='o', s=50
)
# 汚染レベルグラフの初期設定
line1, = ax2.plot([], [], lw=2)
ax2.set_xlim(0, 100)
ax2.set_ylim(0, 50)
ax2.set_title('Total Pollution Level Over Time')
ax2.set_xlabel('Iterations')
ax2.set_ylabel('Pollution Level')
ax2.grid()
# 効率グラフの初期設定
line2, = ax3.plot([], [], lw=2, color='green')
ax3.set_xlim(0, 100)
ax3.set_ylim(0, 100)
ax3.set_title('Collection Efficiency Over Time')
ax3.set_xlabel('Iterations')
ax3.set_ylabel('Efficiency (%)')
ax3.grid()
# アニメーション関数
def animate(i):
sim.update_agents()
# 汚染データとエージェント位置の更新
heatmap.set_array(sim.environment)
agent_scatter.set_offsets([(agent['x'], agent['y']) for agent in sim.agents])
# 履歴データの更新
pollution_history.append(sim.get_pollution_level())
efficiency_history.append(sim.get_collection_efficiency())
# グラフの更新
line1.set_data(range(len(pollution_history)), pollution_history)
line2.set_data(range(len(efficiency_history)), efficiency_history)
return heatmap, agent_scatter, line1, line2
# アニメーションの実行
ani = FuncAnimation(fig, animate, frames=100, interval=200, blit=True)
plt.tight_layout()
plt.show()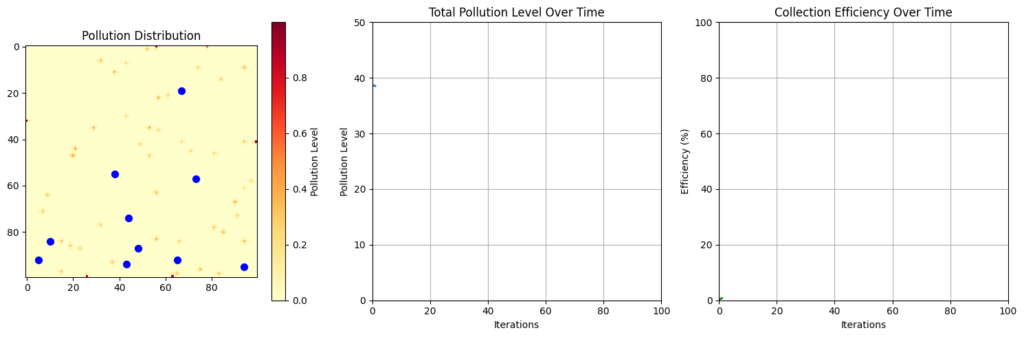
このコードは、環境内のマイクロプラスチック汚染をシミュレートし、AIに制御された浄化エージェントがどのように汚染物質を検出して回収するかを可視化します。左側のヒートマップは汚染分布を表し、青い点はAIエージェントを示しています。中央のグラフは時間経過に伴う汚染レベルの変化、右側のグラフは浄化効率の向上を表示します。
AIエージェントは周囲の汚染レベルを検知し、最も汚染が高い方向に移動するよう設計されています。これは実際のEnviroClean Micro-Agentsが環境中の汚染物質を検出し、効率的に除去する動作を簡略化したモデルです。
まとめ
IBMの4Dプリント技術は、マイクロ粒子の輸送という従来困難だった領域に革命をもたらす可能性があります。AIと組み合わせることで、医療、製造、環境保全などさまざまな分野で新しいビジネスチャンスが生まれるでしょう。
特に環境浄化やターゲットを絞った薬物送達といった応用は、社会的にも大きな価値を持つものとなりそうです。この技術の進展によって、ミクロの世界での操作精度が飛躍的に向上し、私たちの生活や産業にも大きな影響を与えることでしょう。

▼AIを使った副業・起業アイデアを紹介♪

