
はじめに
Pythonの役割と可能性
Pythonは、その直感的な文法と豊富なライブラリにより、人工知能の分野で広く利用されています。特にヒューマノイドロボットの制御では、Pythonは複雑なタスクをシンプルなコードにする能力により、開発者にとって不可欠なツールです。例えば、Pythonでは数行のコードでセンサーデータを読み取り、それを基に動作を決定できます。また、Matplotlibのようなライブラリを使うことで、センサーからのデータをリアルタイムで可視化してヒューマノイドの状態を直感的に理解できます。
import matplotlib.pyplot as plt
import numpy as np
# センサーデータのサンプルを生成
time = np.arange(0, 10, 0.1)
sensor_data = np.sin(time) # サンプルとしてサイン波形を使用
plt.figure(figsize=(10, 4))
plt.plot(time, sensor_data)
plt.title('Sensor Data Over Time')
plt.xlabel('Time (s)')
plt.ylabel('Sensor Value')
plt.grid(True)
plt.show()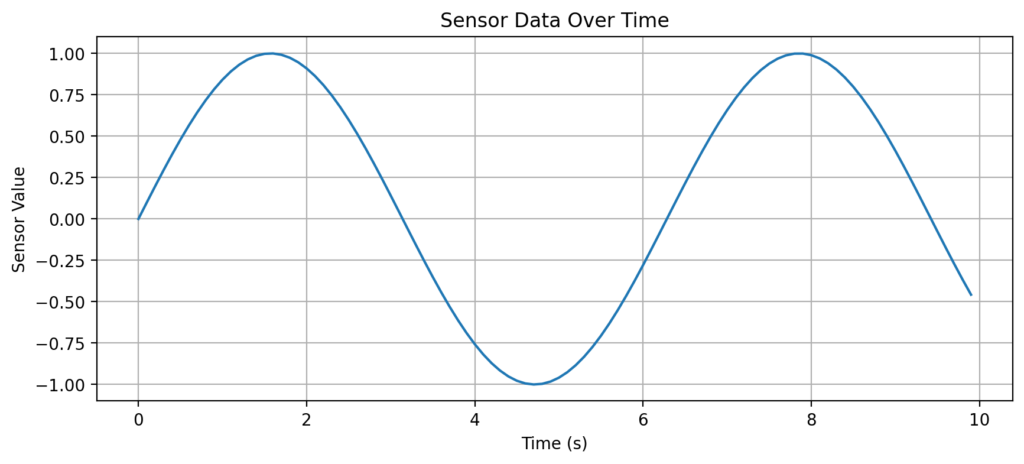
ヒューマノイドロボットの現状
現在ヒューマノイドロボットは、単純な繰り返し作業から人間との対話、災害時の救助活動など幅広い分野での使用が期待されています。この多様な活用の中で、Pythonはその柔軟性と拡張性により、ヒューマノイドロボットの潜在能力を最大限に引き出すための鍵です。センサーの種類や数が増えれば増えるほど、データの解析と処理が複雑になります。Pythonはこのような状況下でも迅速かつ正確に情報を処理できるため、ヒューマノイドロボットの「脳」としての役割を果たします。
ロボットオペレーティングシステム(ROS)の使用
ROSとは何か
ROSは、ロボットソフトウェア開発のための柔軟なフレームワークです。ハードウェアの抽象化、低レベルのデバイス制御、ライブラリの使用、メッセージの伝達など、ロボット開発の様々な面をサポートします。これにより、開発者は機械学習、画像認識、センサー統合など、より高度なタスクに集中できるようになります。
ROSでできること
ROSを使用すると、異なるセンサーやアクチュエーターからの情報を統合し、複雑な動作やタスクの計画を可能にします。例えば、ROSを使用してヒューマノイドロボットが周囲の環境をマッピングし、障害物を回避しながら移動できます。またROSは、多数のライブラリとツールを提供しており、ロボットの動作をシミュレートしテストすることが容易になります。
PythonとROSの連携
Pythonは、ROSとの連携において、スクリプト言語として重要な役割を果たします。Pythonを用いて、ROSのノード(プロセス)を簡単に記述でき、センサーデータの処理や動作計画などのタスクを実行できます。例えば、Pythonで書かれたROSノードは、センサーからのデータを受け取りロボットのアクチュエーターを制御できます。以下のコードは、ROSとPythonを使用してセンサーデータを購読し、単純なログを出力するROSノードのサンプルです。
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import LaserScan
def sensor_callback(msg):
rospy.loginfo('Sensor reading: %s', msg.ranges)
def listener():
rospy.init_node('sensor_listener', anonymous=True)
rospy.Subscriber('scan', LaserScan, sensor_callback)
rospy.spin()
if __name__ == '__main__':
listener()このコードはROSノードを初期化し、LaserScan型のメッセージを購読します。センサーからのデータをリアルタイムで取得し、処理します。これはPythonとROSを組み合わせた強力な例であり、ヒューマノイドロボットの制御におけるPythonの役割を示しています。
シミュレーションツールの使用
シミュレーションの重要性
ヒューマノイドロボットの開発では、シミュレーションが不可欠です。これは、現実世界でのテストが困難であったり、コストがかかりすぎたりするためです。シミュレーションを用いることで、ロボットの動作や環境への対応をあらかじめ試し、安全性や効率を大幅に改善できます。
代表的なシミュレーションツール
ヒューマノイドロボットのシミュレーションには、GazeboやV-REP(現在はCoppeliaSimとして知られている)などのツールがよく使用されます。これらのシミュレーションツールは、物理エンジンを用いてリアルなロボットの動きを再現し、センサーデータのシミュレーションにも対応します。
シミュレーションから実世界への適用
シミュレーションから実世界への適用は、シームレスにすべきです。これを実現するために、Pythonを使ったスクリプトが開発され、シミュレーションでテストされたアルゴリズムを実際のヒューマノイドロボットに簡単に適用できます。
以下に、Matplotlibを使ってシミュレーションデータの視覚化のサンプルコードを紹介します。これは、ロボットがシミュレーション環境内で取得した仮想センサーデータをプロットする例です。
import matplotlib.pyplot as plt
import numpy as np
# 仮想センサーデータのサンプル生成
time = np.linspace(0, 10, 100) # 0秒から10秒までの時間
sensor_data = np.sin(time) + np.random.normal(size=time.size) * 0.1 # センサーデータにノイズを追加
# グラフの描画
plt.figure(figsize=(10, 4))
plt.plot(time, sensor_data, label='Sensor Reading')
plt.title('Simulated Sensor Data Over Time')
plt.xlabel('Time (seconds)')
plt.ylabel('Sensor Value')
plt.legend()
plt.grid(True)
plt.show()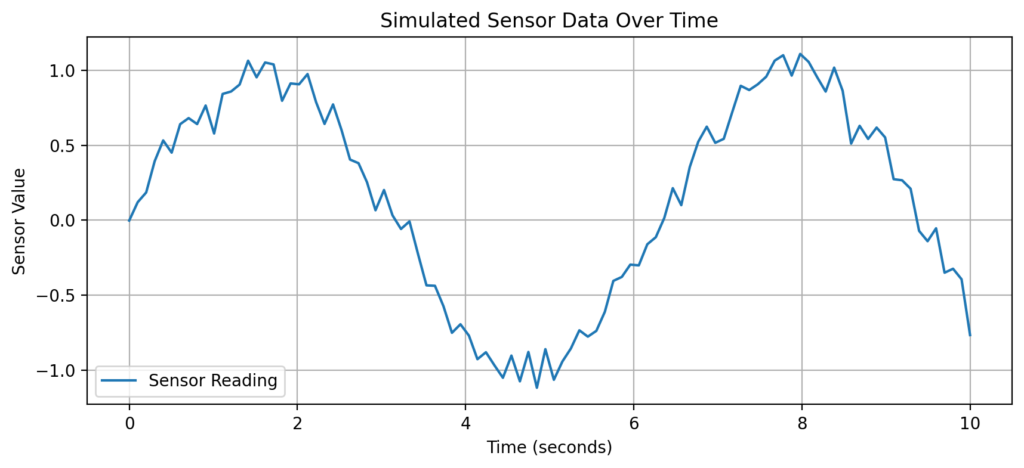
このコードは、シミュレーション中にセンサーから得られる可能性のあるデータの変動を示しており、データの解析やアルゴリズムの開発に役立ちます。
直接制御
Python APIを使った制御
多くのヒューマノイドロボットには、Pythonで書かれたAPI(アプリケーションプログラミングインターフェイス)が提供されており、ロボットの動作を細かく制御できます。開発者はPythonのコードを使用して、モーターの速度を調整したり、センサーからのデータを読み取ったりできます。
センサーとアクチュエーターの連動
ヒューマノイドロボットのセンサーとアクチュエーターは、密接に連携して動作します。センサーからの入力に基づいて、アクチュエーターはロボットの関節を適切に動かすことで、歩行や物の掴みなどの複雑なタスクを実行します。Pythonスクリプトを介して、これらのコンポーネント間の通信を簡単に設定し、ロボットの動きを制御できます。
リアルタイムでの制御の課題
リアルタイムでのロボット制御には、いくつかの課題があります。システムの遅延、計算資源の制限、外部環境の不確実性などが、リアルタイム性能に影響を及ぼす可能性があります。Pythonでは、これらの問題を解決するために非同期処理やマルチスレッド処理が導入されることがあります。
以下は、Python APIを使用してロボットのアクチュエーターを制御する簡単なサンプルコードです。この例では、ロボットのアームを特定の位置に動かすことを想定しています。
# ロボット制御のためのライブラリをインポート
import robot_api
# ロボットアームの目標位置を設定
target_position = {'shoulder': 45, 'elbow': 90, 'wrist': 30}
# ロボットアームを目標位置に動かす
robot_api.move_arm(target_position)
print("アームを指定の位置に動かしました。")このコードは、robot_apiという架空のライブラリを介してロボットのアームを制御しています。実際の使用では、このライブラリはロボットのモデルに対応した実際のAPIに置き換えられます。
学習アルゴリズムの実装
機械学習とロボティクス
機械学習は、ロボティクスの分野で急速に進化しています。特にヒューマノイドロボットでは、環境からのデータを学習して自然で人間に近い動きを実現するために活用されています。Pythonは、その豊富な機械学習ライブラリにより、研究者やエンジニアが効率的にモデルを構築し実験を行うための主な言語です。
強化学習を使った行動の最適化
強化学習は、ロボットが試行錯誤を通じて最適な行動を学ぶ方法です。報酬を基準にして、ロボットは自身の行動を調整し、より多くの報酬が得られるような行動パターンを学習します。Pythonで書かれた強化学習アルゴリズムは、ヒューマノイドロボットが複雑なタスクを効率よくこなすことを可能にします。
データ収集とモデルトレーニング
ヒューマノイドロボットの学習には、大量のデータが必要です。Pythonを使用してセンサーからデータを収集し、そのデータを基にしてロボットの動作モデルをトレーニングします。データ収集から前処理、モデルの構築まで、Pythonはエンドツーエンドのプロセスを支援します。
以下のPythonコードは、強化学習アルゴリズムを使って、ヒューマノイドロボットの歩行を最適化するためのシンプルなフレームワークです。実際の実装では、環境や報酬関数、学習アルゴリズムがさらに複雑になります。
import numpy as np
import matplotlib.pyplot as plt
from reinforcement_learning_framework import Agent, Environment
# 環境とエージェントを初期化
env = Environment()
agent = Agent()
# 学習の進行状況を追跡するためのリスト
rewards = []
# 学習ループ
for episode in range(1000):
total_reward = 0
state = env.reset()
while True:
action = agent.choose_action(state)
next_state, reward, done = env.step(action)
agent.update(state, action, reward, next_state)
total_reward += reward
state = next_state
if done:
break
rewards.append(total_reward)
# 学習の進行状況をプロット
plt.plot(rewards)
plt.title('Learning Progress')
plt.xlabel('Episode')
plt.ylabel('Total Reward')
plt.show()このコードは、エージェントが環境内で行動を選択し、それに対する報酬を受け取ります。その結果をもとに学習する過程を繰り返すことで、ロボットの行動を最適化するプロセスを模擬しています。reinforcement_learning_frameworkは架空のフレームワークであり、実際にはgymやstable-baselinesなどの実際の強化学習ライブラリを使用します。
ChatGPTとの連携
自然言語処理によるヒューマノイドの制御
自然言語処理(NLP)技術は、ヒューマノイドロボットが人間の言葉を理解し反応するために不可欠です。PythonはNLPライブラリが豊富で、ChatGPTのようなモデルを統合して、ロボットに自然な対話を行わせることが可能です。ヒューマノイドが日常的な言葉で指示を受け、理解して動作することは、使い勝手を大きく向上させます。
ChatGPTによるインタラクティブなコマンドインタフェースの構築
ChatGPTを活用することで、インタラクティブなコマンドインタフェースを構築できます。ユーザーが自然言語でコマンドを入力し、ヒューマノイドがそれを解釈して適切に動作するようにプログラムできます。Pythonの強力なAPI連携能力により、このようなシステムの開発が容易になります。
ユーザーの指示を理解して実行するAIの開発
ユーザーからの指示を理解し、それに従って行動するAIを開発するには、高度なNLPモデルが必要です。ChatGPTはそのようなモデルの一例で、Pythonと組み合わせることで、ヒューマノイドロボットがさまざまなタスクを実行できるようになります。
以下のPythonサンプルコードは、簡単なコマンドインタフェースを構築し、ユーザーの指示に基づいてロボットの動作をシミュレートします。
from chat_gpt_interface import ChatGPT
from robot_control_system import HumanoidRobot
# ChatGPTとヒューマノイドロボットのインスタンスを作成
chat_gpt = ChatGPT(api_key="your_api_key")
robot = HumanoidRobot()
# ユーザーからのコマンドを処理する
while True:
user_command = input("コマンドを入力してください: ")
action = chat_gpt.interpret_command(user_command)
if action == "stop":
break
robot.perform_action(action)
# 簡単なシミュレーションを終了
print("シミュレーションを終了します。")このコードは、ユーザーがテキストベースのコマンドを入力し、ChatGPTがそれを解釈してヒューマノイドロボットに何をすべきかを指示するフローを示しています。chat_gpt_interfaceとrobot_control_systemは架空のモジュールであり、実際のコードではOpenAI APIやROSなどの具体的なシステムと連携する必要があります。
ChatGPTとROSの統合による高度なタスクの実現
ROS(Robot Operating System)は、ロボットの開発において標準的なミドルウェアとして広く用いられています。ChatGPTの自然言語処理能力とROSの技術を統合することで、ロボットはより複雑なタスクをこなせるようになります。例えば、ChatGPTがユーザーの質問を解釈し、ROSを通じてロボットに適切な動作を指示する流れを作成できます。
学習と意思決定のための会話型AIの利用
会話型AIは、学習プロセスと意思決定において大きな役割を果たします。ヒューマノイドロボットは、過去の経験から学び、新しい状況に適応する能力を持つことが求められます。ChatGPTのようなAIを利用することで、ヒューマノイドロボットは問題解決能力を高め、自己改善できるようになります。
ヒューマノイドロボットとの対話を通じた教育とフィードバック
ヒューマノイドロボットと人間との対話は、教育的な面でも大きな可能性があります。ロボットが人間の言葉や行動を理解し、適切なフィードバックを提供することで、教育の質を向上させます。また、ユーザーからのフィードバックを受けて、ロボットの行動や応答を改善することも可能です。
以下のPythonサンプルコードは、ChatGPTとROSを統合し、対話を通じてヒューマノイドロボットにタスクを学習させる簡単な例です。
import rospy
from std_msgs.msg import String
from chat_gpt_interface import ChatGPT
from robot_control_system import HumanoidRobot
# ROSノードを初期化
rospy.init_node('chat_gpt_humanoid_interaction')
# ChatGPTとヒューマノイドロボットのインスタンスを作成
chat_gpt = ChatGPT(api_key="your_api_key")
robot = HumanoidRobot()
# ユーザーの入力を処理するコールバック関数
def handle_user_input(data):
user_input = data.data
response, action = chat_gpt.get_response_and_action(user_input)
robot.perform_action(action)
return response
# ユーザーの入力を購読するサブスクライバーを作成
input_subscriber = rospy.Subscriber('user_input', String, handle_user_input)
# ROSとのコミュニケーションを継続
rospy.spin()このコードは、ROSを介してユーザーの入力を購読し、ChatGPTを使ってその入力を解析します。そして、ヒューマノイドロボットが実行するアクションを決定します。chat_gpt_interfaceとrobot_control_systemは架空のモジュールであり、実際のコードでは適切なAPIとロボットの制御システムを統合する必要があります。
ハードウェアインターフェース
マイクロコントローラとの通信
ヒューマノイドロボットを制御するためには、マイクロコントローラとの通信が不可欠です。Pythonはその柔軟性から、マイクロコントローラとのインタフェース作成に適しています。シリアル通信やI2C、SPIなどのプロトコルを用いてマイクロコントローラとデータを交換し、ヒューマノイドロボットのセンサーやアクチュエーターを動かすことができます。
import serial
# シリアルポートを開く
ser = serial.Serial('/dev/ttyUSB0', 9600)
# マイクロコントローラにデータを送信
ser.write(b'Hello, Microcontroller!')
# マイクロコントローラからのデータを受信
data = ser.readline()
print(data.decode())
# シリアルポートを閉じる
ser.close()ヒューマノイドの動力系統
ヒューマノイドロボットの動力系統は、サーボモーターやアクチュエーターを管理することで構成されます。PythonスクリプトはPWM(パルス幅変調)信号を生成し、これらの動力要素を精密に制御できます。これにより、ロボットの動きを滑らかにし、より自然な動作を実現します。
import RPi.GPIO as GPIO
import time
# GPIOピンの設定
GPIO.setmode(GPIO.BCM)
GPIO.setup(18, GPIO.OUT)
# PWMインスタンスの作成と開始
pwm = GPIO.PWM(18, 100) # GPIO 18で100HzのPWM
pwm.start(5) # デューティサイクルを5%に設定
# サーボモーターを制御
try:
while True:
# モーターを動かすコード
pwm.ChangeDutyCycle(7.5) # 90度の位置に移動
time.sleep(1) # 1秒待つ
pwm.ChangeDutyCycle(12.5) # 180度の位置に移動
time.sleep(1) # 1秒待つ
pwm.ChangeDutyCycle(2.5) # 0度の位置に移動
time.sleep(1) # 1秒待つ
finally:
pwm.stop() # PWMを停止
GPIO.cleanup() # GPIOをクリーンアップ組み込みシステムとPython
組み込みシステムは、ヒューマノイドロボットの核心部分です。Pythonは組み込みシステムのプログラミングにも適用でき、特にRaspberry Piのような小型コンピュータでは、ロボットの脳として機能します。Pythonは組み込みLinuxシステム上で動作する多くのライブラリやフレームワークをサポートしており、ロボットのセンシング、処理、アクチュエーションを統合的に管理できます。
import RPi.GPIO as GPIO
import time
# GPIOピンをセットアップ
GPIO.setmode(GPIO.BCM)
GPIO.setup(10, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
# センサーからの入力を監視
while True:
if GPIO.input(10) == GPIO.HIGH:
print("センサーが動きを検出しました!")
time.sleep(0.1) # 100ms毎にチェックこれらのコードスニペットは、Pythonを使ってハードウェアと通信してヒューマノイドロボットの動力系統を制御し、組み込みシステムを操作する基本的な方法です。実際のアプリケーションではこれらの技術を組み合わせて、より複雑なシステムを構築することになります。
まとめ
Pythonによるヒューマノイド制御の未来
Pythonはその高い柔軟性と拡張性で、ヒューマノイドロボットの制御において中心的な役割を果たしています。機械学習や深層学習のアルゴリズムが組み込まれたロボットは、自律的に学習し、より複雑なタスクを遂行できるようになるでしょう。また、自然言語処理の発展により、人とロボットとのコミュニケーションはよりスムーズになります。日常生活でのロボットの役割は大きく拡張されるでしょう。
PythonのライブラリとAPIの充実により、ハードウェアとの統合もより簡単になります。これにより、ヒューマノイドロボットの設計と実験が迅速に行えるようになり、多様な分野への応用が進むと考えられます。教育、介護、災害救助など、社会的なニーズに応えるヒューマノイドロボットの開発が加速することが予測されます。

▼AIを使った副業・起業アイデアを紹介♪

