
イーロン・マスクのテスラ社が、新型ヒューマノイド・ロボット「オプティマス・ジェネレーション2」を発表しました。ロボット開発で使われるIT技術やプログラム言語などを解説します。
テスラが新型ヒューマノイド・ロボット発表
記事によると、テスラ社は、「オプティマス・ジェネレーション2」と呼ばれる新型のヒューマノイド・ロボットを発表しました。テスラの新型ヒューマノイド・ロボットは、人間が行う反復作業を代替します。掃除や食器洗いなどを代行できるようです。
イーロン・マスクCEOは、自動運転車プログラムに使用されているAIや電池・電動モーターの技術を活用することで、ヒューマノイド・ロボットを製作可能だと述べています。マスクは、「自動車を人間の形に変えればいいだけだ」と考えているようです。
今回テスラが発表した新型ヒューマノイド・ロボット「オプティマス・ジェネレーション2」は、テスラ製のアクチュエーターやセンサーを搭載し、より洗練されたデザインになっています。新型ロボットは、歩行速度が30%向上し、バランスの改善と重量の10kg削減が実現されています。また、新しい手のデザインも特徴で、重い物を支える強さと繊細な物を扱うことができます。
イーロン・マスクCEOは、新型ヒューマノイド・ロボットの需要は100億~200億台に達する可能性があると考えており、テスラの自社工場で製造される予定です。
テスラの新型ヒューマノイド・ロボットで使用されるプログラム言語は?
新型ヒューマノイド・ロボットの需要が100億~200億台とはすごいですね。全世界の四輪車の保有台数は2021年に15億7,130万台(引用:一般社団法人日本自動車工業会)なので、その約10倍となります。
では、テスラの新型ヒューマノイド・ロボットでは、どのようなIT技術、プログラム言語、クラウドサーバーなどが使用されているのでしょうか?
記事では言及されていないので、推測してみましょう。
テスラのような先進的な技術企業が新型ヒューマノイド・ロボットの開発で使用するIT技術、プログラム言語、クラウドサービスなどについて考えると、以下のようなものが想定されます。
IT技術
- 機械学習とAI: ロボットの行動や意思決定を支援するための重要な技術です。
- データサイエンス: ビッグデータの分析と処理に必要です。
- ロボティクス: センサー、アクチュエーター、制御システムなどの技術。
- IoT (Internet of Things): ロボットの各部とクラウドサービスとの連携を実現するために使用されます。
プログラミング言語
- Python: AIや機械学習の分野で広く使用されており、強力なライブラリ(TensorFlow、PyTorchなど)が利用可能です。
- C++: パフォーマンスが重要なロボティクスや組み込みシステムの開発に適しています。
- Java: 大規模なエンタープライズシステムやバックエンドシステムの構築に用いられます。
- JavaScript: インタラクティブなフロントエンド開発やウェブベースのアプリケーションに使われることが多いです。
クラウドサービス
- AWS (Amazon Web Services): 強力なコンピューティング能力、ストレージ、AIサービスを提供。
- Azure (Microsoft): クラウドコンピューティング、AI、IoTプラットフォームとして利用されます。
- Google Cloud Platform: AIや機械学習、データアナリティクスのサービスが特に強力です。
おそらく、PythonとGoogle Cloud Platformの組み合わせかなと思いますが、あくまでも推測です。
各技術やツールは、テスラのような最先端のロボット開発において、高度な性能と機能性を実現するために不可欠です。
Pythonでロボット制御
Pythonでロボットを制御するコードを紹介します。簡単な例ですが、下記コードはPythonを使用してシミュレートされた基本的なロボットの動きを表しています。
# Sample Python code to simulate basic robot movements using Python
import matplotlib.pyplot as plt
import numpy as np
# Sample data representing robot movements (x, y coordinates over time)
# Normally, this would be sensor data or output from a control system
time_steps = np.linspace(0, 10, 100) # Time from 0 to 10 seconds
x_positions = np.sin(time_steps) # Simulate x position as a sine wave
y_positions = np.cos(time_steps) # Simulate y position as a cosine wave
# Plotting the robot's path
plt.figure(figsize=(8, 6))
plt.plot(x_positions, y_positions, label='Robot Path')
plt.title("Robot Movement Simulation")
plt.xlabel("X Position")
plt.ylabel("Y Position")
plt.grid(True)
plt.legend()
plt.show()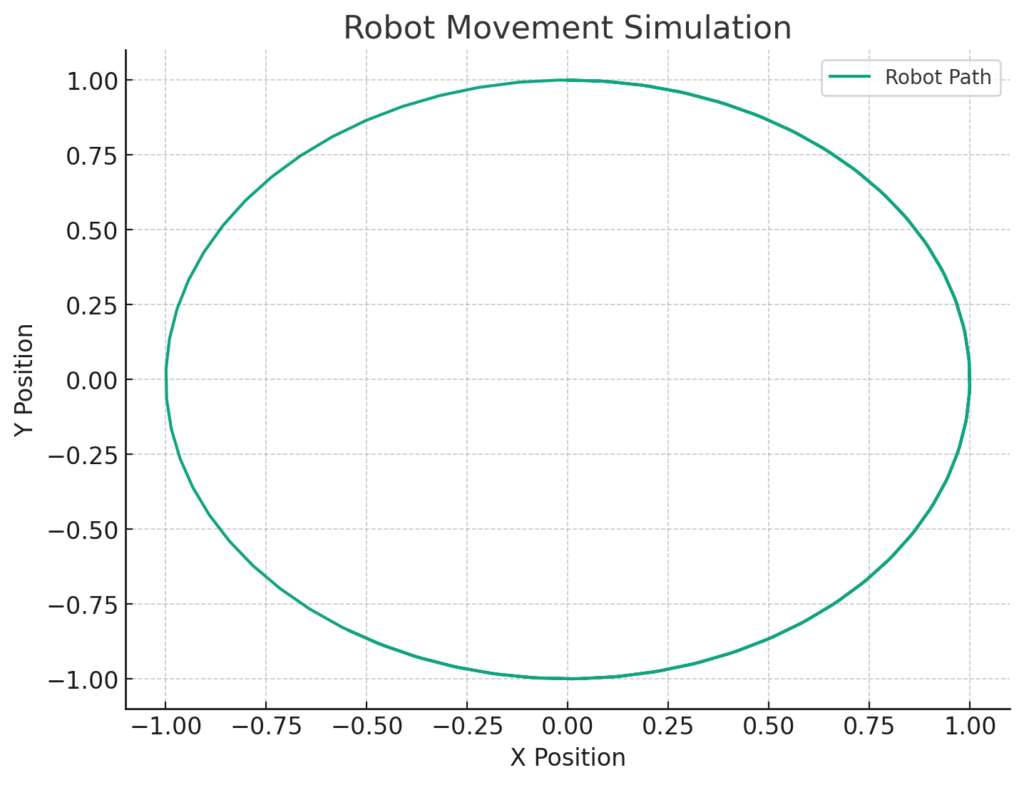
この例では、ロボットのXとY座標が時間とともにどのように変化するかを示しています。実際のロボット制御では、センサーデータや制御システムの出力に基づいて、より複雑な動きやタスクがプログラムされることになります。
上記のシンプルな例では、時間の経過に伴うX座標を正弦波、Y座標を余弦波で表現しており、ロボットが時間とともにどのように動くかを視覚化しています。
あなたもAIエンジニアに転職して、新型ヒューマノイド・ロボットを開発しましょう。

▼AIを使った副業・起業アイデアを紹介♪

